多轴飞行器PID参数详解及excel辅助演示
来源:晨风影像科技 作者:上海航拍 发布时间:2014-02-21 12:03 已经有:人看过
在MWC中,PID参数对于新手来说是个比较难的问题.
PID的理论比较好理解,有很多的帖子,但在实际上,PID三个参数对结果影响的描述都比较抽象,基本没有具体针对多轴飞行器PID的叙述。
但是有一个很好的视频,相信大家基本都看过,我这里还是把它贴一下:
下面是适合新手的简单PID调节方法:
这个视频讲述了一个针对MWC中PID的调节方法,简单实用,我也是基本按照这个方法调试的。
为了更好的理解这个视频和PID参数的作用,特意根据多轴飞行器的原理和PID理论,编写了一个EXCEL图表,直观的来理解PID参数的作用。
在这个模型中:
1、假设输出是力,作用在一个质块上,使用加速度、速度、位移积分计算,评估输出对测量值产生的影响,跟多轴飞行器的运动模式比较接近。
2、让速度响应慢一个拍子,模拟电调和电机的响应滞后。
3、加入阻尼,模拟空气的衰减作用
4、引入偏差,用于体现I的作用,从中间加入,代表一个系统误差或外作用力
PID的作用概述:
1、P产生响应速度和力度,过小响应慢,过大会产生振荡,是I和D的基础。
2、I在有系统误差和外力作用时消除偏差、提高精度,同时也会增加响应速度,产生过冲,过大会产生振荡。
3、D抑制过冲和振荡,过小系统会过冲,过大会减慢响应速度。
通过这个模型和图表,一步步演示PID参数的作用和调试方法:
1、逐步增大P,看P对响应速度和力度的影响,调到系统发生振荡,再减少一点P
当P=0.1时,响应很慢,但不会振荡

粗黑线是系统响应,洋红线是目标值。
逐步增大P,P=1,有振荡,但慢慢在衰减

继续增大P,P=3,振荡会逐步加大

取振荡但会衰减的P=1继续调整
在多轴调试时,当振荡发生时,再稍微减小一点P。
2、加入D,看D对振荡的控制能力,D过小会发生过冲,D过大会迟滞,以稍微有点过冲为最佳
D=0.5,有较大的过冲和少量振荡,衰减很快

D=1.3,基本没过冲

D=2,响应迟滞,减慢了响应速度

取以稍微有点过冲的D=1.3为最佳
在多轴调试时,用手拍一下机臂或倾斜启动,机臂在复位时有少量过冲为宜。(不过我喜欢基本没过冲时的参数,这样在悬停时更稳)
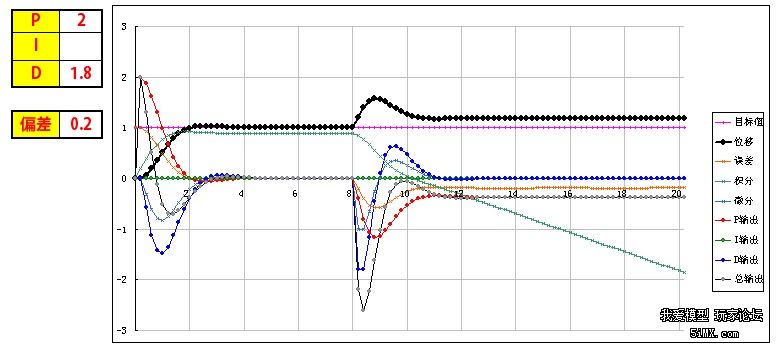
3、可以继续增大P和D,让响应更快但过冲也不大。
P=2 D=1.8

在理论上可以这样演示,但在实际多轴的调试时,这一步一般不做,这是为了更安全和稳定。
4、加入0.2的偏差,看偏差对位移的影响
从中间加入,代表一个外作用力。
可以看到,如果没有I的作用,偏差将一直存在,尽管P产生了一个抵抗力,但只是阻止了系统继续运动,但偏差一直在。
在多轴调试时,如果持续的抬起一个机臂,机臂会持续的转动,抵抗力很小,放手后也不会回复。
5、加I,看I对偏差的修正能力,I加快了响应速度,但也会导致过冲或振荡
I=0.3 基本可以消除偏差产生的影响,产生了少量过冲,但提高了在有偏差时系统的精度

I=3 进一步加快响应速度,但产生了振荡

取基本能纠正偏差的I=0.3
在多轴调试时,油门开至悬停油门,用手持续的抬起一个机臂,可以感到随着I的增加,抵抗力会逐步增大,持续时间加长。因为多轴的长期稳定由姿态模式的LEVEL参数来解决,所以I不用太大,取缺省参数就可以了,大概可以抵抗1-2秒左右。
6、增大一点D,减小一点I产生的过冲
取消偏差,因为I的加入,有一点过冲

增大D,D=2.2,减小过冲

在实际多轴调试时,这一步一般不用,但是如果有必要,可以试一下。
好了,曲线演示完了,这同时也是多轴PID参数的调试过程,结合视频一起看,能更好的理解这一过程,希望对大家理解PID有所帮助。
附:多轴飞行器PID调试演示器.xls
http://url.cn/R1vaK7
下载的文件名可能有问题,自己把文件名改为"多轴飞行器PID调试演示器.xls"就可以用了.


您可能想了解








